Бирка (шильдик) электродвигателя
Осмотрев любой, за редким исключением, электродвигатель можно обнаружить табличку, привинченную на болты, саморезы или же заклепки. Что же написано на данном куске металла? Возьмем шильдик, заменив на нем заводской номер на название сайта.
![]()
Кстати, редко бывает, что табличка на электрооборудование находится в таком, почти идеальном состоянии. Часто данные выцветают или замазаны краской, ведь задача стоит для обслуживающего персонала покрасить двигатель, а не покрасить двигатель, оставив табличку нетронутой. Но, нам повезло. Пойдем по-порядку.
Первая строчка
— число фаз и тип тока (3
), заводской номер, частота сети, форма исполнения и монтажа, класс изоляции
Вторая строчка
— тип электродвигателя, косинус фи, возможные схемы соединения, номинальная частота вращения
Третья строчка
— возможные номинальные напряжения, номинальная мощность, IP — степень защиты электродвигателя, масса, режим работы электродвигателя (S1).
Четвертая строчка
— номинальные токи в зависимости от схемы включения обмоток, далее какому госту соответствует эд.
Рассмотрим отдельные параметры более подробно.
Мощность электродвигателя: полная, активная и на валу
Формула для расчета мощности трехфазного асинхронного двигателя:
S1 — полная мощность, потребляемая двигателем из сети
P1 — активная мощность, потребляемая электродвигателем из сети (указана на шильдике)
P — активная мощность на валу ЭД.
cosf — косинус фи, коэффициент мощности — угол сдвига фаз между активной (P) и полной мощностью (S).
В формулах выше, значение мощности получится в Вт, значение полной мощности в ВА. Чтобы перевести в киловатты необходимо получившееся значение разделить на тысячу. Значение тока и напряжения соответственно в формуле выше в амперах и вольтах.
I1 и U1 — линейные значения тока и напряжения, их еще называют междуфазными. Не стоит путать с фазными. Линейные — это АВ, ВС, СА (380); фазные — АО, ВО, СО (220). Если выразить формулы мощностей через фазные значения тока и напряжения, то вместо корня из трех вначале будет коэффициент 3. Этот коэффициент определяется наглядно через векторную диаграмму трехфазного напряжения.
Для двигателей постоянного тока формула будет просто произведение напряжения на зажимах двигателя умножить на ток, потребляемые двигателем из сети.
Потребляемая мощность p1 больше мощности на валу ЭД из-за потерь, которые возникают при преобразовании электрической энергии в механическую.
Звезда/Треугольник и 220/380, 380/660
Смотреть все значения по порядку как они идут через дробь. То есть написано на шильде Y/D ( треугольник/звезда), значит и токи, напряжения соответственно будут сначала для Y, а после дроби для звезды. Единственно, нюанс, что при 220/380 — треугольник будет 220, А при 380/660 — треугольник будет 380. То есть говорить, что 380 — это всегда звезда — неверно.
Выбор генератора по мощности
Выбирая генератор, потребитель обращает внимание на различные параметры установки – вес, запас моторесурса, мобильность, наличие дополнительного функционала, цену, и т.д. Но в первую очередь необходимо выбирать установку, ориентируясь на ее мощность
Как правильно рассчитать этот показатель и на что обратить внимание?
Чтобы было понятней, разберем эту ситуацию на простом примере. Допустим, в нашем пользовании имеются такие бытовые приборы: пылесос, калорифер, морозильник. Мощность этих бытовых приборов составляет соответственно 1 кВт, 2 кВт и 0,3 кВт. Получается, чтобы обеспечить работу этих приборов, нам необходим генератор мощностью не менее 3 кВт. Чтобы понять это, разберемся в таком понятии, как номинальная мощность генератора.
Номинальная, или, как ее еще называют, реальная мощность установки, существенно отличается от максимальной. В технической документации производители чаще всего указывают именно максимальные показатели по мощности для данной модели генератора. Стоит отметить, что с такой нагрузкой установка без критических последствий может работать очень непродолжительное время – в некоторых случаях это секунды, иногда 1-2 минуты. В то же время реальная, или номинальная мощность несколько ниже максимального показателя. Для ее расчета необходим коэффициент мощности cos φ. Этот показатель определяется отношением активной мощности к полной.
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
![]()
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
![]()
![]()
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
![]()
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
![]()
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
![]()
![]()
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
![]()
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
![]()
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
![]()
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Переход от угловой к линейной скорости
Существует различие между линейной скоростью точки и угловой скоростью. При сравнении величин в выражениях, описывающих правила вращения, можно увидеть общее между этими двумя понятиями. Любая точка В, принадлежащая окружности с радиусом R, совершает путь, равный 2*π*R. При этом она делает один оборот. Учитывая, что время, необходимое для этого, есть период Т, модульное значение линейной скорости точки В находится следующим действием:
ν = 2*π*R / Т = 2*π*R* ν.
Так как ω = 2*π*ν, то получается:
Следовательно, линейная скорость точки В тем больше, чем дальше от центра вращения находится точка.
К сведению. Если рассматривать в качестве такой точки города на широте Санкт-Петербурга, их линейная скорость относительно земной оси равна 233 м/с. Для объектов на экваторе – 465 м/с.
Числовое значение вектора ускорения точки В, движущейся равномерно, выражается через R и угловую скорость, таким образом:
а = ν2/ R, подставляя сюда ν = ω* R, получим: а = ν2/ R = ω2* R.
Это значит, чем больше радиус окружности, по которой движется точка В, тем больше значение её ускорения по модулю. Чем дальше расположена точка твердого тела от оси вращения, тем большее ускорение она имеет.
Поэтому можно вычислять ускорения, модули скоростей необходимых точек тел и их положений в любой момент времени.
Понимание и умение пользоваться расчётами и не путаться в определениях помогут на практике вычислениям линейной и угловой скоростей, а также свободно переходить при расчётах от одной величины к другой.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
https://youtube.com/watch?v=XXxPz3_f4hY
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».
Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.
Это интересно: Варистор — устройство, принцип действия и назначение
Как определить мощность асинхронного электродвигателя.
Электродвигатель – обмотка статора
Время от времени в процессе работы, нужно найти количество оборотов асинхронного электродвигателя, на котором отсутствует бирка. И далековато не каждый электрик с этой задачей может совладать. Но мое мировоззрение, что каждый электрослесарь в этом должен разбираться. На собственном рабочем месте, как говорится – по долгу службы, вы понимаете все свойства собственных движков. А перебежали на новое рабочее место, а там ни на одном движке нет бирок. Найти количество оборотов электродвигателя, даже очень просто и просто. Определяем по обмоттке. Для этого нужно снять крышку мотора. Лучше это проделывать с задней крышкой, т. к. шкив либо полумуфту снимать не нужно. Довольно снять кожух
остывания и крыльчатку и крышка мотора доступна. После снятия крышки обмотку видно довольно отлично. Найдите одну секцию и смотрите сколько
![]()
Движок – 3000 об/мин
места она занимает по окружности круга (статора). А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
Движок – 1500 об/мин
Если в окружности вместится три секции (120 град.) – это движок 1500 об/мин. Ну и если в статоре вмещается четыре секции (90 град.) – этот движок на 1000 об/мин. Вот так совершенно просто можно найти количество оборотов “неизвесного” электродвигателя. На представленных рисунках это видно отлично.
Движок – 1000 об/мин
Это способ определения, когда катушки обмоток намотаны секциями. А бывают обмотки “всыпные”, таким способом уже не найти. Таковой способ намотки встречается изредка.
Еще есть один способ определения количество оборотов. В роторе электродвигателя, есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем крутить ротор. Эту ЭДС можно “изловить” – миллиамперметром. Наша задачка заключается в следующем: необходимо отыскать обмотку одной фазы, независимо как соединены обмотки, треугольником либо звездой. И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
(2p) 2 3000 r/min (2p) 4 1500 r/min (2p) 6 1000 r/min (2p) 8 750 r/min
Вот такие обыкновенные и думаю понятные два способа определения колличества оборотов на котором отсутствует бирка (табличка).
В СССР выпускался прибор ТЧ10-Р, может у кого и сохранился. Кто не лицезрел и не знал о таком измерителе, предлагаю поглядеть фото собственного. В комплекте имеется две насадки, – для измерения оборотов по оси вала и 2-ая для измерения по окружности вала.
![]()
Измерить колличество оборотов можно и при помощи “Цифрового лазерного тахометра”
![]()
“Цифровой лазерный тахометр”
Технические свойства:
Спектр: 2,5 об / мин ~ 99999 об / ми Разрешение / шаг: 0,1 об / мин для спектра 2,5 ~ 999,9 об / мин, 1 об / мин 1000 об / мин и поболее Точность: + / – 0,05% Рабочее расстояние: 50mm ~ 500mm Также указывается малое и наибольшее значение Для тех кому реально необходимо – просто супер вещь! Л. Рыженков
Схема подключения электродвигателя к сети
Электродвигатели переменного тока бывают трех и однофазные. Асинхронные однофазные двигатели имеют на корпусе 2 вывода и подключить их к сети не составляет трудности. Т.к. вся бытовая электрическая сеть в основном однофазная 220В и имеет 2 провода — фаза и ноль. С синхронными все намного интереснее, их тоже можно подключить с помощью 2 проводов, достаточно обмотки ротора и статора соединить. Но соединять их нужно так, чтобы обмотки однополюсного намагничивания ротора и статора располагались напротив друг друга. Сложности представляют двигатели для 3ех фазной сети. Ну во-первых у таких двигателей в основном в клеммной коробке 6 выводов и это означает что обмотки двигателя нужно подключать самому, а во-вторых их обмотки можно подключать разными способами — по типу «звезда» и «треугольник». Ниже приведен рисунок соединения клем в клеммной коробке, в зависимости от типа соединения обмоток.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
Источник
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
5.18.4 Электромагнитная асинхронная муфта
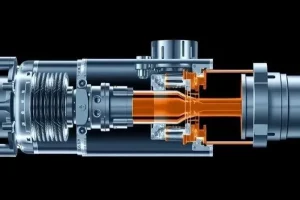
Электромагнитная асинхронная муфта (рис. 5.18.4.1)
устроена по принципу асинхронного двигателя и служит для соединения двух частей
вала. На ведущей части вала 1 помещается полюсная система 2, представляющая
собой систему явно выраженных полюсов с катушками возбуждения. Постоянный ток
в катушке возбуждения подводится через контактные кольца 4. Ведомая часть муфты
3 исполняется по типу роторной обмотки двигателя.
Принцип работы муфты аналогичен работе асинхронного
двигателя, только вращающийся магнитный поток здесь создается механическим вращением
полюсной системы. Вращающий момент от ведущей части вала к ведомой передается
электромагнитным путем. Разъединение муфты производится отключением тока возбуждения.
Управление электрическим током позволяет осуществлять
дистанционное управление муфтой (плавно сцеплять и расщеплять ее). Поэтому ее
применяют в автоматике и телемеханике.
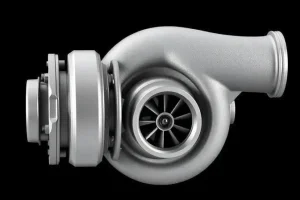
Внешняя скоростная характеристика (ВСХ)
Внешняя скоростная характеристика двигателя показывает зависимость мощности, расхода топлива и крутящего момента от числа оборотов коленвала. Все эти параметры показываются графически в виде кривых.
![]()
Внешняя скоростная характеристика
На рисунке можно видеть кривые с обозначениями Pe – мощность двигателя, Mе – крутящий момент, ge – удельный расход топлива. Как видно, с ростом числа оборотов и мощности увеличивается расход топлива. Крутящий момент растет до определенного уровня, а затем идет на спад. В точке, где наиболее эффективный крутящий момент и мощность двигателя, будет самый оптимальный показатель расхода топлива.
Производители моторов борются за то, чтобы максимальный крутящий момент двигатель развивал в как можно более широком диапазоне оборотов («полка крутящего момента была шире»), а максимальная мощность достигалась при оборотах, максимально приближенных к этой полке. Такой двигатель и из болота вытянет, и в городе позволяет быстро ускоряться.
Внешняя скоростная характеристика дает оценку динамическим характеристикам автомобиля, определяет КПД и топливный расход при разных параметрах.
Преимущества и недостатки
К преимуществам асинхронных электродвигателей, в сравнении с другими типами электрических машин следует отнести:
- Относительно меньшая стоимость, в сравнении с другими типами электродвигателей, за счет простоты конструкции;
- Высокая степень надежности, благодаря отсутствию вспомогательных элементов редко выходят со строя;
- Способны выносить кратковременные перегрузки;
- Могут включаться в цепь напрямую без использования дополнительного оборудования;
- Низкие затраты на содержание в ходе эксплуатации.
Основными недостатками асинхронного электродвигателя являются относительно большие пусковые токи и слабый пусковой момент, что в определенной степени ограничивает сферу прямого включения. Также асинхронные электродвигатели обладают низким коэффициентом мощности и сильно зависят от параметров питающего напряжения.
Информационная табличка на двигателе (шильдик)
Полную и достоверную информацию о двигателе можно узнать, если уметь «читать» шильдик. Точнее то, что на нем написано. Начнем описание шильдика рассматриваемого двигателя сверху вниз.
![]()
Далее построчно:
- Название двигателя. Значок слева – эмблема завода-изготовителя, справа – знак качества СССР.
- Слева: тип двигателя – в этом наборе букв и цифр кодировалась технологическая информация. В кодировку могли включить данные о: количестве катушек в одной обмотке; количество витков провода в одной катушке; скольким числом проводов намотаны катушки; тип лака, примененного для пропитки и т.д. Справа: заводской номер двигателя.
- Слева направо: количество рабочих фаз; частота рабочего напряжения (Гц); мощность двигателя (W); cos φ – коэффициент мощности тока (параметр показывает, какое количество тока, взятого из сети, используется по назначению). Чем больше мощность, тем выше этот параметр.
- Число оборотов в минуту вала двигателя; характеристики статора – по каким схемам можно соединять обмотки (треугольник или звезда); величина(ы) рабочего напряжения.
- Ток, потребляемый двигателем, соответствующий каждой схеме соединения обмоток (в данном случае — 2,3 А при соединении «треугольником» и 1,33 А – «звездой»); коэффициент полезного действия (КПД), степень пыле- влагозащиты (IP44).
- ГОСТ СССР, по которому сделан двигатель; класс изоляции, режим S1. Режим S1 означает, что это постоянный режим работы. В таком режиме двигатель может оставаться включенным в работу на длительное время.
- Страна-производитель двигателя.
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина — вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором . В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина — вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов .