Новое направление — индукторные приводы
Технология изготовления и применения, управляемого индукторного привода (ИП) является передовой и наиболее перспективной в области силового электропривода. Индукторный двигатель (ИД) имеет простую и надёжную конструкцию.
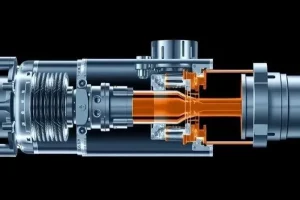
Ротор – зубчатый без обмоток, не имеет стержней и постоянных магнитов, набирается из листов электротехнической стали.
Статор – зубчатый, шихтованный, обмотка в виде катушек, устанавливаемых на зубцы (полюсы) и объединённых в несколько фаз.
Катушки не имеют пересекающихся лобовых частей, что повышает их долговечность и обеспечивает легкую ремонтопригодность (достаточно заменить одну катушку, вышедшую из строя, при этом соседние катушки остаются не тронутыми).
![]()
Питается ИД от блока управления, с применением IGBT транзисторов, путём поочерёдной подачи импульсов напряжения на катушки по сигналам от датчика положения ротора, что обеспечивает формирование механической характеристики практически в любом диапазоне. Изменением частоты следования импульсов регулируется частота вращения ротора в широких пределах при сохранении неизменным КПД. Изменением длительности импульсов напряжения регулируется момент и мощность двигателя.
Программно управляемая микропроцессорная система, позволяет осуществлять коррекцию естественной механической характеристики при реализации электропривода для тяговой, вентиляторной, крановой, экскаваторной и другими типами нагрузок.
ИД характеризуется длительной и безотказной работой в динамических режимах с частыми пусками и остановками. При этом пуск механизма осуществляется плавно. В ИД отсутствуют пусковые токи. При запуске величина токов не превышает номинальных значений. Максимальная частота управляющих импульсов не превышает 250 – 300 Гц.
ИД обладает уникальным свойством, принципиально отличающим его от других электрических машин, которое обеспечивает его повышенную живучесть, – это отсутствие обмоток ротора, отсутствие скользящего контакта, магнитная и электрическая независимость его фаз. Поэтому повреждение какой-либо одной или нескольких катушек не приводит к полной потере работоспособности привода, как у двигателей постоянного и переменного тока, а только частично снижает его мощность.
По сравнению с частотно-регулируемым асинхронным двигателем индукторный двигатель имеет более высокий КПД (на 3–5 %) при таких же габаритах.
Принципы работы
![]()
На сегодняшний день становится очень популярным вентильный двигатель, принцип работы которого основан на том, что контролер устройства начинает коммутировать обмотки статора. Благодаря этому вектор магнитного поля остается всегда сдвинутым на угол, приближающийся к 900 (-900) относительно ротора. Контролер рассчитан на управление током, который движется через обмотки двигателя, в том числе и величиной магнитного поля статора. Следовательно, можно регулировать момент, который воздействует на прибор. Показатель угла между векторами может определить направление вращения, которое действует на него.
Нужно учитывать, что речь идет об электрических градусах (они значительно меньше геометрических). Для примера приведем расчет вентильного двигателя с ротором, который в себе имеет 3 пары полюсов. Тогда оптимальным его углом будет 900 /3=300. Эти пары предусматривают 6 фаз обмоток коммутации, тогда получается, что вектор статора может перемещаться скачками по 600. Из этого видно, что настоящий угол между векторами обязательно будет варьироваться в пределах от 600 до 1200, начиная с вращения ротора.
Вентильный двигатель, принцип работы которого основывается на обороте фаз коммутации, из-за которых поток возбуждения поддерживается относительно постоянным движением якоря, после их взаимодействия начинает формировать вращающийся момент. Он устремляется повернуть ротор таким способом, чтобы все потоки возбуждения и якоря совпали воедино. Но во время его разворота датчик начинает переключать обмотки, и поток перемещается на следующий шаг. В этот момент результирующий вектор сдвинется, но останется полностью неподвижным сравнительно с потоком ротора, что в итоге и создаст вращающий момент вала.
Технические характеристики
При выборе конкретной модели важно определить ее соответствие месту установки, поэтому важно обращать внимание на следующие характеристики вентильных двигателей:
- номинальное напряжение – определяет питающую величину, которая должна подаваться на вентильный двигатель для получения номинального усилия;
- потребляемая мощность – характеристика электродвигателя, показывающая величину мощности, расходуемую на работу устройства;
- КПД – показывает соотношение полезной работы, совершаемой вентильным двигателем к израсходованной мощности;
- мощность на валу – полезная работа электрической машины, совершаемая за счет тягового усилия;
- номинальная частота – определяет количество оборотов в минуту, которые вентильный двигатель может совершать в номинальном режиме работы;
- диапазон регулировки частоты – показывает, в каких пределах можно изменять частоту оборотов вала для конкретной модели;
- номинальный крутящий момент – определяет усилие, создаваемое на валу вентильного двигателя при оптимальных параметрах работы, также в параметрах может регламентироваться пусковой и максимальный момент;
- коэффициент нагрузки – показывает, насколько снижается эффективность электрической машины, в зависимости от подъема над уровнем моря;
- габаритные размеры и масса вентильного двигателя.
Реактивная модификация
Сделать вентильный реактивный электродвигатель своими руками можно только на базе щеточного коллектора. В первую очередь потребуется подобрать ротор с обмоткой. Далее под него устанавливается вал. В некоторых случаях его используют с объемной насадкой. Для уменьшения силы трения понадобится небольшое кольцо на роликовых подшипниках.
Далее на вентильный реактивный электродвигатель устанавливается бендикс. В данном случае диск фиксируется на шпонке. Клеммная коробка обязана располагаться в задней части двигателя. Вал при этом должен находиться в центральной части корпуса. Вентиляционные отверстия чаще всего делают над ротором.
Подключение асинхронного двигателя к трехфазной сети
Остановимся более подробно на подключении двигателя. Завод-производитель, как правило, маркирует не только клеммы в клеммной коробке, но и концы проводов. В реальности это либо алюминиевые скобки, либо пластиковые или картонные бирки с номером провода. Обмотки в современных двигателях указывается, как U, V, W. Начало обмоток цифрой “1”, а конец – цифрой “2”. Как вы уже знаете, асинхронный двигатель может быть включен по схеме “звезда”, а также по схеме “треугольник”. В 90% случаев используется именно подключение “звезда”.
Итак, у нас обмотки двигателя соединены по схеме “звезда”. Куда же нам подать напряжение, чтобы двигатель начал свое вращение?
Оказывается, все просто. Так как в трехфазной сети у нас в основном 4 провода ( Фаза A, Фаза B, Фаза C, Земля), то соответственно, мы должны задействовать все 4 провода.
Есть также небольшой нюанс при подключении асинхронного двигателя к трехфазной сети. Допустим, если мы подключили двигатель по схеме выше, то у нас вал будет вращаться в одну сторону, допустим, по часовой стрелке.
![]()
Но если мы поменяем две любые фазы местами, то двигатель начнется вращаться в противоположном направлении. Такой эффект называется реверсивным включением асинхронного двигателя.
![]()
Все то же самое касается и при подключении асинхронного двигателя по схеме “треугольник”. Имейте ввиду, что при включении двигателя в этом режим, мы на шильдике должны посмотреть допустимое напряжение, на которое рассчитан этот двигатель по схеме соединения “треугольник”. Если по схеме “звезда” мы можем подать на такой двигатель питание 380 Вольт, то по схеме “треугольник” только 220 Вольт.
![]()
Принцип работы электродвигателя
1. Согласно на проводник с током I в магнитном поле будет действовать сила F.
2. Если проводник с током I согнуть в рамку и поместить в магнитное поле, то две стороны рамки, находящиеся под прямым углом к магнитному полю, будут испытывать противоположно направленные силы F
3. Силы, действующие на рамку, создают или момент силы, вращающий ее.
4. Производимые электродвигатели имеют несколько витков на , чтобы обеспечить больший постоянный .
5. Магнитное поле может создаваться как магнитами, так и электромагнитами. Электромагнит обычно представляет из себя провод намотанный на сердечник. Таким образом, по ток протекающий в рамки будет индуцировать ток в обмотки электромагнита, который в свою очередь будет создавать магнитное поле.
- Подробное описание принципа работы электродвигателей разных типов:
ФОРМУЛА ИЗОБРЕТЕНИЯ
1. Вентильный индукторно-реактивный двигатель, содержащий безобмоточный ротор с зубцами и статор, зубцы (полюса) которого охвачены катушками и размещены так, что образуется m-фазная магнитная система, отличающийся тем, что число зубцов на статоре Z 1=k×2m выбирается кратным 2m, число зубцов ротора Z2=Z1±k, где k=2, 3, 4, , а катушки двух m-фазных сосредоточенных обмоток статора размещены на зубцах (полюсах) таким образом, чтобы все магнитодвижущие силы в одноименных фазах одной и той же обмотки были направлены одинаково или от статора к ротору, или от ротора к статору.
2. Вентильный индукторно-реактивный двигатель по п.1, отличающийся тем, что при четном m магнитодвижущие силы катушек одноименных фаз разных обмоток направлены одинаково или от статора к ротору, или от ротора к статору.
3. Вентильный индукторно-реактивный двигатель по п.1 или 2, отличающийся тем, что при нечетном m магнитодвижущие силы катушек одноименных фаз разных обмоток направлены в противоположные стороны (например, если магнитодвижущие силы катушки первой фазы одной обмотки направлены от статора к ротору, то магнитодвижущие силы катушки первой фазы другой обмотки — от ротора к статору).
4. Вентильный индукторно-реактивный двигатель по п.1 или 2, отличающийся тем, что катушки фаз разных обмоток, надетых на зубцы (полюсы) статора, чередуются.
Принцип работы синхронного двигателя
![]()
Смотреть галерею
Вентильный синхронный двигатель работает на основе взаимодействия магнитных полей ротора и статора. Схематически магнитное поле при вращении можно изобразить плюсами этих же магнитов, которые движутся со скоростью магнитного поля статора. Поле ротора также возможно изобразить как постоянный магнит, который делает обороты синхронно с полем статора. В случае отсутствия внешнего вращающего момента, который прикладывается к валу аппарата, оси полностью совпадают. Воздействующие силы притяжения проходят вдоль всей оси полюсов и могут компенсировать друг друга. Угол между ними приравнивается к нулю.
В случае если на вал машины будет воздействовать тормозной момент, то ротор перемещается в сторону с запаздыванием. Благодаря этому силы притяжения разбиваются на составляющие, которые направляются вдоль оси плюсовых показателей и перпендикулярно к оси полюсов. Если будет прикладываться внешний момент, который создает ускорение, то есть начинает действовать по направлению вращения вала, картинка по взаимодействию полей полностью изменится на обратную. Направленность углового смещения начинает трансформироваться на противоположное, и в связи с этим меняется направление тангенциальных сил и воздействие электромагнитного момента. При таком раскладе двигатель становится тормозным, а аппарат работает как генератор, который подводимую к валу механическую энергию преобразует в электрическую. Далее она перенаправляется в сеть, питающую статор.
Когда будет отсутствовать внешний, явнополюсный момент начнет принимать положение, при котором ось полюсов магнитного поля статора будет совпадать с продольной. Это размещение станет соответствовать минимальному сопротивлению потока в статоре.
В случае воздействия на вал машины тормозного момента ротор отклонится, при этом магнитное поле статора будет деформированным, так как поток стремится замкнуться по наименьшему сопротивлению. Для его определения необходимы силовые линии, направленность которых в каждой из точек будет соответствовать движению действия силы, поэтому изменение поля приведет к появлению тангенциального взаимодействия.
Рассмотрев все эти процессы в синхронных двигателях, можно выявить демонстративный принцип обратимости разнообразных машин, то есть возможность любого электрического аппарата изменить направленность преобразованной энергии на противоположную.
Принцип действия индукционного генератора
Принцип действия индукционного генератора основан на законе электромагнитной индукции — индуцирование электродвижущей силы в прямоугольном контуре (проволочной рамке), находящейся в однородном вращающемся магнитном поле, или наоборот, прямоугольный контур вращается в однородном неподвижном магнитном поле. Если в контуре вращается однородное магнитное поле с равномерной угловой скоростью, то в нем индуктируется синусоидальная электродвижущая сила.
Индукционный генератор переменного тока
Это электрическая машина, преобразующая механическую энергию в электрическую энергию переменного тока, например, за счет вращения проволочной катушки в магнитном поле, или, наоборот, за счет вращения магнита. До тех пор, пока силовые линии магнитного поля пересекают проводящую катушку, в ней индуцируется электрический ток. Индуцированный электрический ток течет таким образом, что его поле отталкивает магнит, когда рамка приближается к нему, и притягивает, когда рамка удаляется. Каждый раз, когда рамка изменяет ориентацию относительно полюсов магнита, электрический ток также изменяет свое направление на противоположное. Все то время, пока источник механической энергии вращает проводник (или магнитное поле), генератор будет вырабатывать переменный электрический ток.
Устройство индукционного генератора
По конструкции выделяют генераторы:
- с неподвижными магнитными полюсами и вращающимся якорем,
- с вращающимися магнитными полюсами и неподвижным статором.
Генераторы с неподвижными магнитными полюсами используются чаще, поскольку при неподвижной статорной обмотке нет необходимости снимать с помощью скользящих контактов (щеток) и контактных колец с ротора большой ток высокого напряжения. Статор (неподвижная часть) собирается из отдельных железных листов, изолированных друг от друга, а на внутренней поверхности статора имеются пазы, куда вкладываются провода статорной обмотки генератора. Ротор (подвижная часть) обычно изготавливают из сплошного железа, а полюсные наконечники магнитных полюсов ротора собирают из листового железа. Для создания максимально возможной магнитной индукции при вращении между статором и полюсными наконечниками ротора желателен минимальный зазор, а геометрическую форму полюсных наконечников подбирают такой, чтобы вырабатываемый генератором ток был наиболее близок к синусоидальному. На сердечники полюсов садят катушки возбуждения, питаемые постоянным током, который подводится с помощью щеток к контактным кольцам, расположенным на валу генератора.
Электромеханический индукционный генератор
Магнитное поле в электромеханическом генераторе создается с помощью постоянного или электромагнита, переменная электродвижущая сила индуцируется в обмотке. В промышленных генераторах поле создается вращающимся магнитом, обмотки остаются неподвижными.
Генератор индукционного тока
Генераторы индукционного тока имеют широкую область применения: чаще всего их используют в местах, в которых требуется непрерывная подача электроэнергии, таких как медицинские учреждения, морозильные склады и т.п. также такие генераторы могут быть востребованы на строительных площадках и для электрификации загородных домов.
Генератор индукционного нагрева
Индукционный нагрев — это нагревание электропроводящих материалов электрическими токами, которые индуцируются переменным магнитным полем. Генераторы индукционного нагрева применяются для:
- нагрева заготовок из магнитных материалов, в том числе для гибки и термообработки деталей,
- термической обработки мелких и хрупких деталей,
- поверхностной закалки изделий,
- плавки, сварки и пайки металлов,
- обеззараживания медицинского инструмента.
Источник
Реактивный двигатель
Вентильно-реактивный двигатель работает с использованием двухфазных обмоток, которые установлены вокруг диаметрально противоположных полюсов статора. Подача питания продвигается к ротору в соответствии с полюсами. Таким образом, его противодействие полностью сводится к минимуму.
Вентильный двигатель, своими руками созданный, обеспечивает высокоэффективную скорость привода при оптимизированном магнетизме для работы с реверсом. Информация о месторасположении ротора используется для того, чтобы управлять фазами подачи напряжения, так как это является оптимальным для достижения непрерывного и плавного крутящего момента и высокой эффективности.
Сигналы, которые выдает реактивный двигатель, накладываются на угловую ненасыщенную фазу индуктивности. Минимальное сопротивление полюса полностью соответствует максимальной индуктивности устройства.
Положительный момент можно получить только при углах, когда показатели позитивные. На небольших скоростях фазный ток обязательно должен быть ограниченным, чтобы произвести защиту электроники от высоких вольт-секунд. Механизм преобразования можно иллюстрировать линией реактивной энергии. Мощностная сфера характеризует собой питание, которое преобразовывается в механическую энергию. В случае его резкого отключения избыточная или остаточная сила возвращается к статору. Минимальные показатели влияния магнитного поля на производительность устройства являются основным его отличием от похожих устройств.
Возможно, вам также будет интересно
Моделирование электромеханических комплексов, исследование динамики и разработка системы автоматического управления (САУ) позволяют без капитальных затрат решать проблемы анализа и синтеза сложных систем управления. При этом совершенствование процессов моделирования с использованием персональной техники и увеличение многообразия используемых моделей позволяют создавать объекты, способные рассчитывать практически любые характеристики реального объекта при допустимых погрешностях. Солнечная энергетика и гелиотехника являются
Разновидности источников бесперебойного питания Существует множество разновидностей ИБП, отличающихся и по топологии, и по принципу действия, и по конструктивному исполнению. В соответствии с международным стандартом IEC 62040-3 различают три основных типа ИБП: резервный — Passive Standby, который ранее назывался Off-Line (IEC 62040-3.2.20); линейно-интерактивный — Line-Interactive (IEC 62040-3.2.18); с двойным преобразованием — Double Conversion, который ранее назывался On-Line (IEC 62040-3.2.16). ИБП резервного типа (рис. 1) наиболее простой и дешевый. В нормальном режиме работы нагрузка получает питание
Компания International Rectifier представила первое семейство радиационно-стойких (RAD-Hard) сдвоенных силовых транзисторов MOSFET в компактном герметичном корпусе LCC-6 для поверхностного монтажа, предназначенных для применения в маломощных приложениях, требующих минимальных массо-габаритных показателей, таких как системы питания аппаратуры целевых систем космических аппаратов.
Небольшие габаритные размеры корпуса LCC-6 (6,2×4,3×2 мм) позволяют уменьшить площадь и вес платы. Новый 60-В логический уровень устройств доступен в конфигурациях: два транзистора с каналом n-типа, два …
Построение структурной Simulink-модели и исследование МСРИМ во вращающейся системе координат
Структурная модель МСРИМ, составленная по системе уравнений (5), приведена на рис. 8. Момент и угловая скорость вычисляются в соответствии с двумя последними уравнениями системы.
![]()
Рис. 8. Структурная модель МСРИМ
В блоке Subsystem1 вычисляются токи двигателя по продольной и поперечной составляющим в соответствии с первыми двумя уравнениями системы (5). Модель блока Subsystem1 показана на рис. 9. В блоке Subsystem вычисляются индуктивности и их производные, модель блока Subsystem показана на рис. 10.
![]()
Рис. 9. Структурная модель вычисления токов продольной и поперечной составляющих МСРИМ
![]()
Рис. 10. Модель для вычисления индуктивностей и их производных
В блоке Subsystem вычисляются:
- индуктивности по продольной и поперечной составляющим по данным (рис. 5);
- производные индуктивностей по току
после предварительной апроксимации их прямыми линиями.
Модели блоков dif_d и dif_q показаны на рис. 11. В них учитывается знак производной при возрастании и убывании тока.
![]()
Рис. 11. Модели для вычисления производных по току от индуктивностей
Результаты моделирования переходных процессов по моменту и скорости в МСРИМ приведены на рис. 12.
![]()
Рис. 12. Переходной процесс в МСРИМ при ud = 0, uq = Uq = 120 В
При пуске на холостом ходу в момент времени (t = 0) электромагнитный момент и скорость имеют колебательный характер. Аналогичный характер переходного процесса имеет место при приложении внешнего нагрузочного момента (t = 0,3 c).
Электропривод, построенный на базе рассмотренной машины по подчиненному принципу с релейными регуляторами в контурах тока и пропорциональным регулятором в контуре скорости, исследован в работах . В основе этих исследований принята математическая модель машины в фазных координатах.
Аналогичная модель электропривода, построенная по подчиненному принципу, в которой использовано математическое описание машины во вращающейся d, q системе координат, показана на рис. 13. Переходные процессы в этом электроприводе приведены на рис. 14. На рис. 14а показаны переходные процессы в линейной зоне при пуске на холостом ходу (t = 0) с последующим (t = 0,1 c) приложением нагрузочного момента. На рис. 14б показаны переходные процессы в зоне насыщения регулятора скорости при пуске на холостом ходу (t = 0) с последующим (t = 0,2 c) приложением нагрузочного момента.
![]()
Рис. 13. Модель электропривода с МСРИМ во вращающихся d,q координатах
![]()
Рис. 14. Переходные процессы в электроприводе с МСРИМ
Количественно результаты, полученные в предыдущих исследованиях и в настоящей статье, совпадают. Качественное отличие заключается в отсутствии пульсаций момента при анализе машины в d, q вращающихся координатах. Эти пульсации составляют несколько процентов и могут не учитываться при исследовании транспортных электроприводов и электроприводов общепромышленного назначения.
Дополнительные компоненты двигателя
Помимо основных деталей, которые обязательно присутствуют в конструкции двигателя, есть еще дополнительные детали и узлы, которые улучшают характеристики и работу ДВС. ![]()
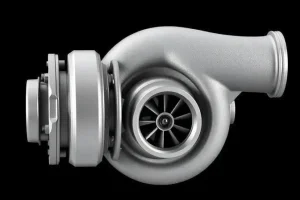
Принцип работы турбины
Турбина — это устройство, которое создает дополнительного нагнетание топлива. Двигатель с турбиной имеет большую производительность.
Идея создания турбины появилась при обнаружении такого факта, что при движении поршня вверх, солярка не успевает полностью сгорать.
С помощью турбины, сгорание топлива в цилиндрах происходит до конца, за счет чего уменьшается расход топлива и увеличивается мощность ДВС.
Турбонаддув, он же турбонагнетатель состоит из:
- подшипники — служит опорой дает возможность вращаться валу;
- кожух на турбине;
- кожух на компрессоре;
- стальная сетка.
Цикл работы турбонаддува:
- Компрессор создает вакуум и всасывается воздух внутрь системы.
- Ротор турбины передает вращение ротору.
- Интеркулер охлаждает воздух.
- Через впускной коллектор осуществляется подача воздуха, предварительно воздух проходит степени очистки (воздушные фильтры). После поступления воздуха, впускной клапан закрывается.
- Отработанные газы движутся через турбину ДВС и создают давление на ротор.
- В этот момент скорость вращения турбины вала турбины очень высока, достигает 1500 оборотов в секунду. От этого начинает вращаться ротор компрессора.
Цикл далее повторяется.
![]()
Интеркулер и форсунка
При сжатии плотность воздуха и температура увеличиваются. Это негативно сказывается на межремонтном периоде деталей двигателя. В связи с чем была разработано устройство, которое охлаждает горячий воздушный поток.
В зависимости от модификации дизельных двигателей, в цилиндре топливо может распыляться одной или двумя форсунками.
Презентация на тему: » Вентильно-индукторная электрическая машина Начало производства 4 квартал 2013 года До настоящего времени индукторные машины производились исключительно.» — Транскрипт:
1
Вентильно-индукторная электрическая машина Начало производства 4 квартал 2013 года До настоящего времени индукторные машины производились исключительно силами ООО «СЭЗ-Энерго» г. Сафоново – единственным производителем данного оборудования в России. Для определения потенциала предприятия в текущем году на ООО «Бородинский РМЗ» осваивается процесс сборки индукторного двигателя (для конвейера КЛМ-4500) ЗАО «Разрез Березовский». Назначение: переход от штатных электрических машин к вентильно-индукторному электроприводу, как наиболее энергоэффективному и перспективному на сегодняшний день
![]()
2
Пооперационный процесс изготовления индукционного мотора выглядит следующим образом 1. В целях минимизации затрат на дальнейшую установку, индукционная машина изготавливается из основных частей подлежащих замене штатных электрических машин – корпуса с подшипниковыми щитами и вала ротора. 2. Проточка при необходимости ротора и статора. Восстановление шейки вала и проточка под посадку внутренней обоймы подшипников. 3. Изготовление листов (сегментов) статора и ротора на установке лазерной резки металла. 4. Установка электроники в дополнительную слаботочную выводную коробку (преобразователи электрического сигнала от датчика положения ротора и датчиков температуры обмоток и подшипников). 5. Пакетирование сердечников статора в статорном каркасе. 6. Установка в крышке с задней стороны на траверсе двух плат оптических датчиков. 7. Балансировка на холостом ходу и номинальной частоте вращения.
![]()
3
Капитальный ремонт тепловозаТЭМ-2 При капитальном ремонте КР-1 тепловоза производятся следующие основные работы: Полная разборка дизеля с проверкой, ремонтом и восстановлением изношенных и заменой негодных узлов и деталей Замена медных, асбостальных, резиновых, паронитовых и других уплотнений и соединений Разборка, очистка, ремонт, сборка и испытание электрических машин и аппаратуры с заменой негодных элементов аппаратов, шунтов, полупроводниковых элементов, датчиков, ламелей, катушек и других деталей Разборка, очистка, ремонт и проверка тележек; ремонт и проверка рамы тележки в соответствии с требованиями чертежей и инструкции по сварочным работам; освидетельствование и ремонт колесных пар Начало производства 4 квартал 2013 года
![]()
4
Ролик конвейера КЛМ-4500 базальтопластиковый Начало производства 2 квартал 2013 года Основа ролика- базальтопластиковая труба Ø 159 L-750. В качестве подшипников скольжения используются втулки из графита. Подшипниковые буксы изготавливаются из фторопласта. На данный момент ООО «Бородинский РМЗ» выпущена опытная партия в количестве пяти штук, которые в дальнейшем будут проходить испытания на оборудовании ЗАО «Разрез Березовский»
![]()
5
При изготовлении корпуса балансира была применена технология плазменной резки, что значительно ускорило процесс изготовления данного изделия. Корпус балансира ЭР 1250
![]()
6
Защита ковша экскаватора P&H 2300 XPS При изготовлении защиты ковша экскаватора P&H 2300 XPS была изготовлена модельная оснастка для литья данного вида продукции. Защита ковша изготавливается из износостойких сталей.
![]()
7
Защита ковша экскаватора P&H 2300 XPS.
![]()
8
Ковш с упряжью экскаватора ЭШ 10/70. При изготовлении ковша ЭШ-10/70 была применена технология плазменной резки, что значительно ускорило процесс изготовления данного изделия и снижению стоимости ковша на 6 процентов от первоначальной.
![]()
9
Детали ковша экскаватора Buсyrus 495 HD.
![]()
10
Капитальный ремонт турбокомпрессора ТК-30С-02 тепловоза ТЭМ 7 При ремонте турбокомпрессоров на ООО «Бородинский РМЗ» производится замена лопаток, втулок, замена роторов, опрессовка корпусов. После ремонта производится обкатка и испытания турбокомпрессоров.
![]()
11
Изготовление барабанов на конвейер Тугнуйской обогатительной фабрики При изготовлении барабана на ООО «Бородинский РМЗ» были изготовлены фланцы с применением плазменной резки с фаской под углом 45°, буксы изготовлены в механическом участке. После изготовления барабана была произведена центровка. По наружной поверхности производится футеровка резиновыми пластинами.
![]()
12
Спасибо за внимание!