Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
![]()
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
![]()
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
![]()
большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
![]()
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Асинхронные двигатели с фазным ротором
Основной способ управления АД с фазным ротором – изменение величины скольжения между статором и ротором.
Регулирование с помощью напряжения
Через специальные автотрансформаторы ЛАТР, путем изменения напряжения на обмотках двигателя, производят регулировку оборотов вала.
![]()
Данный способ так же подходит и к АД с короткозамкнутым ротором. Таким способ можно регулировать в пределах от минимума до номинальных параметров двигателя.
Установка активного сопротивления в цепи ротора
Переменное реостатное сопротивление или набор сопротивлений в цепи ротора воздействует на ток и поле ротора. Изменяя таким образом величину скольжения и количество оборотов двигателя.
Чем больше сопротивление, тем меньше ток, тем больше величина скольжения АД и меньше скорость.
![]()
Достоинства такого регулирования.
- Большой диапазон регулирования оборотами электрической машины.
- Мягкая выходная характеристика мотора.
Недостатки такого способа.
- Уменьшение КПД двигателя.
- Ухудшение рабочих характеристик механизма.
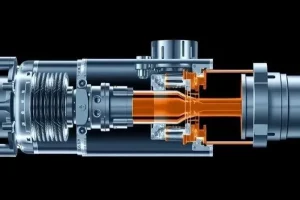
Основные элементы, которые входят в структуру частотного преобразователя
Частотный преобразователь состоит из следующих компонентов:
- Мостовой выпрямитель на 1 или 3 фазы, оборудован конденсатором на выходе, является источником постоянного напряжения.
- Мостовой инвертор (IGBT) питается постоянным напряжением с помощью широтно-импульсного метода модуляции, служит для генерации напряжения переменного тока с изменяемой амплитудой и частотой.
- Модуль управления, который подает команды проводимости на инвертор. Они зависят от сигналов, подаваемых оператором и сведений о результатах измерений электрических величин (сетевое напряжение, нагрузочный ток двигателя).
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
![]()
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
![]()
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Структура частотного регулятора
Большинство частотных преобразователей для электродвигателей до 690 В выполнены по схеме двухуровневых инверторов напряжения. Они позволяют моделировать напряжение питания необходимой формы, амплитуды частоты. Такие устройства состоят из неуправляемого выпрямителя, 2-х транзисторных ключей на каждую фазу и конденсатора. Выходное напряжение содержит высшие гармоники, которые сглаживаются индуктивной нагрузкой. Специальные фильтры применяют относительно редко.
![]()
К недостаткам такой схемы является ограничение величины выходного напряжения, которое определяется максимальным напряжением полупроводниковых устройств.
Для высоковольтных приводов используются многоуровневые схемы регулирования. Они состоят из нескольких однофазных инверторов, соединенных последовательно. Такая схема позволяет избежать резонансов, обеспечивает высокое быстродействие, снижает скорость нарастания напряжения. Такие ПЧ имеют модульную конструкцию. При выходе из строя одной из ячеек, ее легко заменить. К недостаткам этой схемы относятся необходимость отдельного источника питания для каждого модуля, функции которого выполняет трансформатор специального назначения.
![]()
Преобразователи частоты с плавающими конденсаторами позволяют обойтись без входного трансформатора и увеличивать число ячеек в зависимости от требуемой мощности. Такое решение обеспечивает снижение высших гармоник, уменьшает скорость нарастания напряжения.
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Применение частотных преобразователей
В качестве регуляторов оборотов электродвигателей 220В и 380В используются частотные преобразователи. Это высокотехнологичные электронные устройства, которые позволяют кардинально изменить характеристики тока (форму сигнала и частоту). В их основе находятся мощные полупроводниковые транзисторы и широтно-импульсный модулятор. Вся работа прибора управляется блоком на микроконтроллере. Изменение скорости вращения ротора двигателя происходит плавно.
![]()
Поэтому частотные преобразователи используются в нагруженных механизмах. Чем медленнее разгон, тем меньшие нагрузки будет испытывать конвейер или редуктор. Все частотники оснащены несколькими степенями защиты – по току, нагрузке, напряжению и прочими. Некоторые модели частотных преобразователей питаются от однофазного напряжения (220 Вольт), делают из него трехфазное. Это позволяет подключать асинхронные моторы дома без использования сложных схем. И не потеряется мощность при работе с таким устройством.
Изменение числа полюсов
Уменьшение или увеличение количества пар полюсов – еще один эффективный способ провести регулировку. Этот вариант особо актуален для моделей двигателей многоскоростного действия со сложными роторными обмотками. Данные элементы разделены на определенные группы и чередуются в процессе работы. Осуществляется это посредством коммутации, подключением последовательным или параллельным способом.
К преимуществам такого варианта регулировки относят:
- высокий КПД силового агрегата;
- требовательные механические выходные характеристики.
Стоимость реализации – одна из самых высоких, если сравнивать с другими технологиями. Вес и размеры готовой установки также немаленькие, что требует наличия свободного места для монтажа. Сам мониторинг оборотов осуществляется со ступенью в 1500 – 3000 оборотов в минуту.
Устройство и принцип работы частотного регулятора
Принцип частотного регулирования основан на зависимости угловой скорости вращения ротора от частоты напряжения на обмотках статора. С появлением IGBT-транзисторов и GTO-тиристоров наибольшее распространение получила схема преобразования частоты на базе широтно-импульсного модулятора.
Такие преобразователи частоты состоят:
- Из силового выпрямителя с С или LC фильтром для сглаживания пульсаций.
- Из инвертора на IGBT-транзисторах для преобразования постоянного напряжения в переменное, заданной частоты и амплитуды.
- Из блока управления для генерации отпирающих силовые транзисторы импульсов.
Переменное напряжение выпрямляется и преобразуется в постоянное, затем снова инвертируется в переменное. Частота на силовом выходе ПЧ определяется длительностью отпирающих силовые транзисторы импульсов, поступающих со схемы управления.
Такой способ регулирования позволяет изменять частоту и амплитуду напряжения в силовой цепи электродвигателя, а значит управлять скоростью вращения ротора и моментом на валу электрической машины.
Асинхронные двигатели с фазным ротором
Основной способ управления АД с фазным ротором — изменение величины скольжения между статором и ротором.
Регулирование с помощью напряжения
Через специальные автотрансформаторы ЛАТР, путем изменения напряжения на обмотках двигателя, производят регулировку оборотов вала.
Данный способ так же подходит и к АД с короткозамкнутым ротором.
Таким способ можно регулировать в пределах от минимума до номинальных параметров двигателя.
Установка активного сопротивления в цепи ротора
Переменное реостатное сопротивление или набор сопротивлений в цепи ротора воздействует на ток и поле ротора. Изменяя таким образом величину скольжения и количество оборотов двигателя.
Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
Расчет количества катушек. Полученное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),
![]()
Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
2p = Z1 / y,
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:
Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
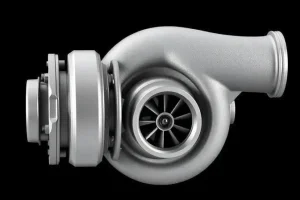
Регулирование частотой
Специальные устройства, преобразователи частоты (другие названия инвертор, частотник, драйвер), подключаются к электрической машине. Путем выпрямления напряжения питания, преобразователь частоты внутри себя формирует необходимые величины частоты и напряжения, и подает их на электрический двигатель.
![]()
Необходимые параметры для управления АД преобразователь рассчитывает самостоятельно, согласно внутренним алгоритмам, запрограммированным производителем устройства.
![]()
Преимущества регулирование частотой.
- Достигается плавное регулирование частоты вращения электромотора.
- Изменение скорости и направление вращения двигателя.
- Автоматическое поддержание требуемых параметров.
- Экономичность системы управления.
Единственный недостаток, с которым можно смирится, это необходимость в приобретении частотника. Цены на такие устройства совсем незаоблачные, и в пределах 150 уе, можно обзавестись преобразователем для 2 кВт двигателя.
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.
![]()
Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
![]()
Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
![]()
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Источник